swin transformer
motivation
- 图像变化很大,不固定
- 相较于文本信息,图像具有更大的分辨率,意味着计算复杂度要更大
contribution
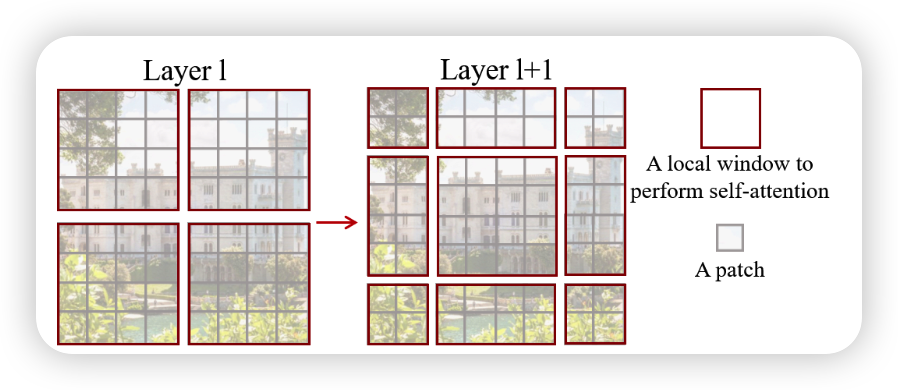
- 利用分层结构来处理图像,使模型能够处理不同尺度的图片
- 使用window self-attention来降低计算复杂度
architecture
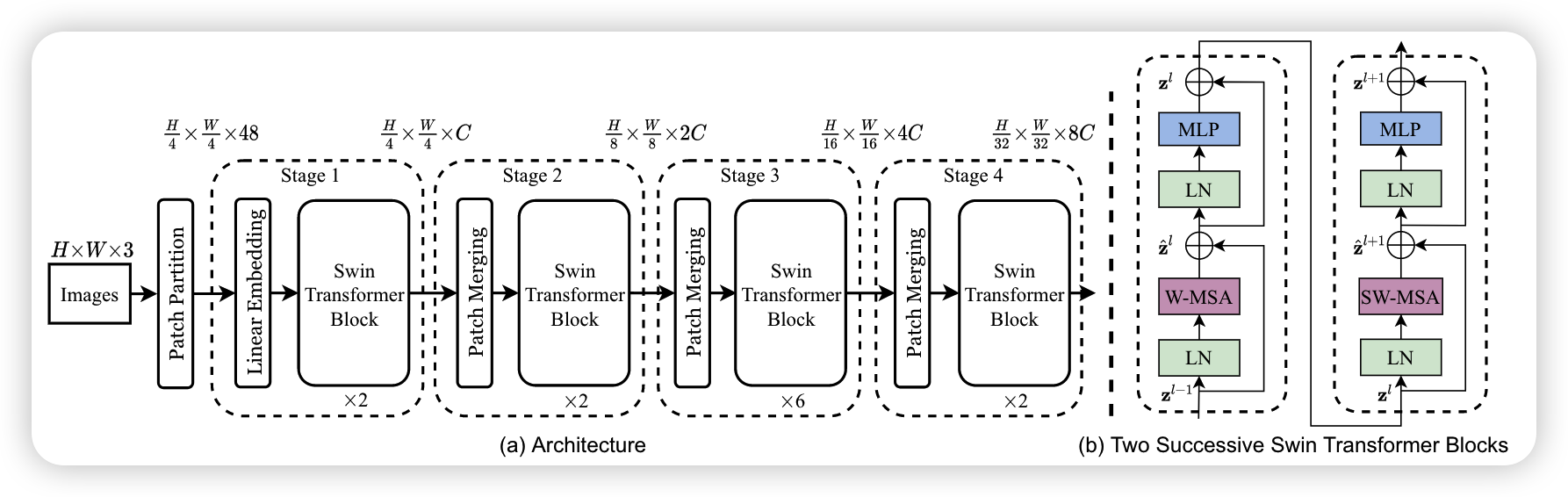
由上图可以看出基本流程如下:
- 首先将图片进入Patch Partition,将输入的特征图划分为一系列重叠的,固定大小的分块,从图中可以看出来长和宽缩小了四倍,所以每个分块大小是4*4个像素,然后在channel层进行展开,所以维度变成了16 * 3 =48,所以维度变为了[H/4 , W/4 , 48],然后经过一个Linear Embedding将通道变为C
- 接着就是四个大致相同的stage模块,每个模块除了第一个都是Patch Merging+STB的结构,Patch Merging的作用是进行下采样,STB的作用是利用注意力机制,获取像素之间的联系信息,其结构如右图,包含两个结构,它们的区别在于一个使用的是W-MSA,一个使用的是SW-MSA
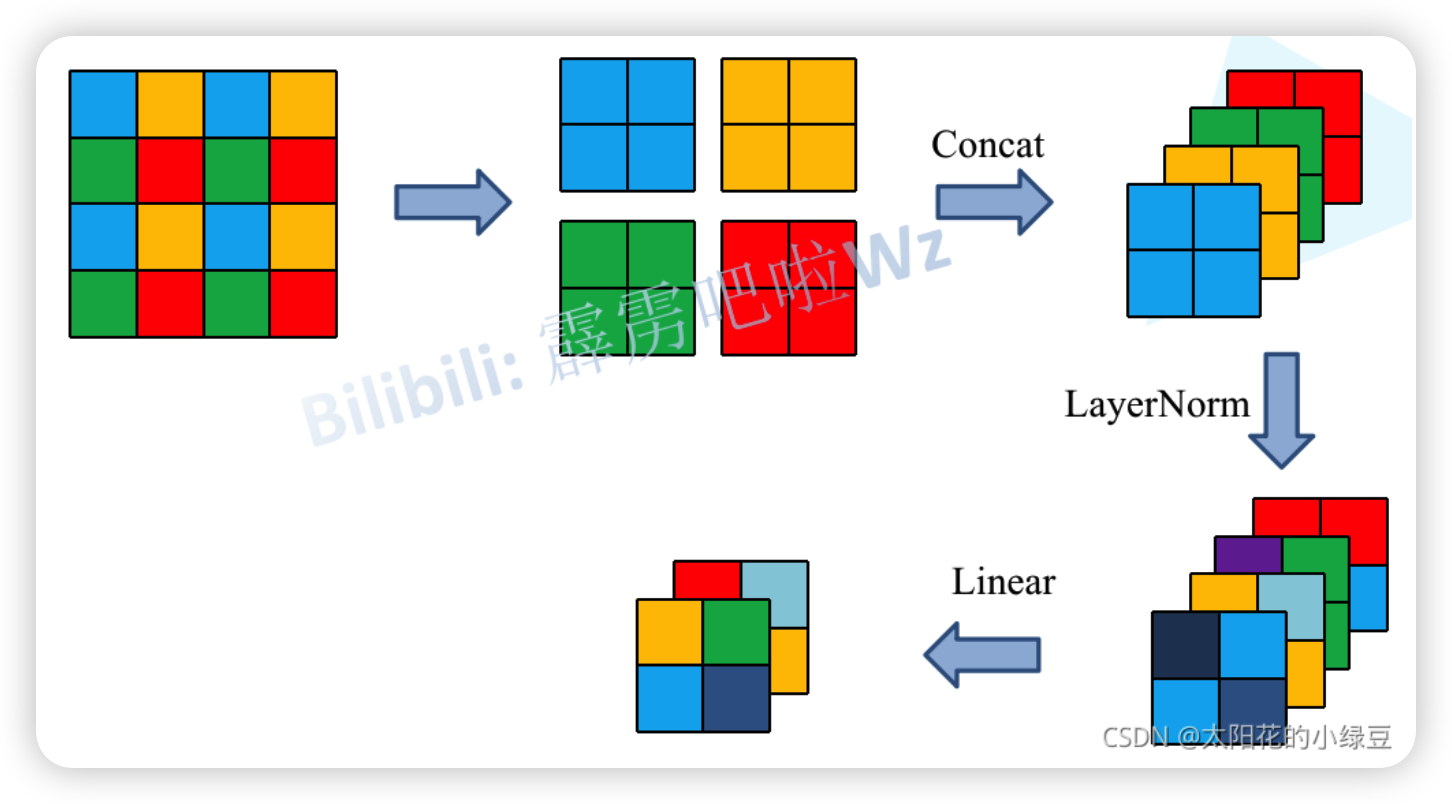
Patch Merging
Patch Merging的作用是对图像进行下采样,和卷积网络中的pooling操作类似,下面是它的过程图,它首先会将输入特征图划分成多个2 * 2的patch图,然后提取每个patch中相同位置的像素然后拼接在一起,然后对这四个feature map进行concat操作,然后经过一个LayerNorm层,即标准化处理,最后经过一个Linear层调整通道数,这样得到的图像会从[H , W, C]——>[H/2 , W/2 , 2C]
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
class PatchMerging(nn.Module):
r""" Patch Merging Layer.
Args:
dim (int): Number of input channels.
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
"""
def __init__(self, dim, norm_layer=nn.LayerNorm):
super().__init__()
self.dim = dim
#创建全连接层
self.reduction = nn.Linear(4 * dim, 2 * dim, bias=False)
self.norm = norm_layer(4 * dim)
def forward(self, x, H, W):
"""
x: B, H*W, C
"""
B, L, C = x.shape
assert L == H * W, "input feature has wrong size"
x = x.view(B, H, W, C)
# padding
# 如果输入feature map的H,W不是2的整数倍,需要进行padding
pad_input = (H % 2 == 1) or (W % 2 == 1)
if pad_input:
# to pad the last 3 dimensions, starting from the last dimension and moving forward.
# (C_front, C_back, W_left, W_right, H_top, H_bottom)
# 注意这里的Tensor通道是[B, H, W, C],所以会和官方文档有些不同
x = F.pad(x, (0, 0, 0, W % 2, 0, H % 2))
# 按照patch merging的过程抽出四个数组
x0 = x[:, 0::2, 0::2, :] # [B, H/2, W/2, C]
x1 = x[:, 1::2, 0::2, :] # [B, H/2, W/2, C]
x2 = x[:, 0::2, 1::2, :] # [B, H/2, W/2, C]
x3 = x[:, 1::2, 1::2, :] # [B, H/2, W/2, C]
# 进行concat拼接
x = torch.cat([x0, x1, x2, x3], -1) # [B, H/2, W/2, 4*C]
x = x.view(B, -1, 4 * C) # [B, H/2*W/2, 4*C]
#进行batchnorm
x = self.norm(x)
# 通过创建的全连接层,将4c转化为2c
x = self.reduction(x) # [B, H/2*W/2, 2*C]
return x
Swin Transformer Block
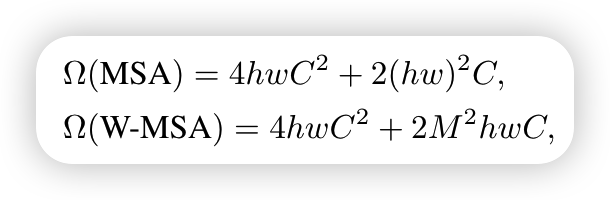
W-MSA
W-MSA的结构大致和MSA的结构相似,区别在于W-MSA将特征图划分为一个个window,计算self-attention时只在window内部进行,这样会大大减少计算量,论文中给出了两者计算量之间的差距,公式如下
对于MSA的公式
首先是self-attention的计算公式如下
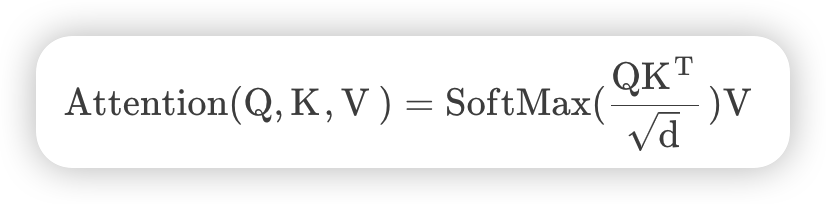
首先对于Q,K,V而言都是通过输入特征图与对应矩阵相乘得到的,输入特征图的维度是[h*w,c],对应的矩阵维度是[c,c],所以计算Q,K,V三个的复杂度为3 * h * w * c * c
Q([h*w,c])与K的转置([c,h * w])的积的复杂度为hw * c * hw,忽略除以d和softmax的计算量,最后与v相乘,复杂度为hw * hw * c,这是单头的self-attention的计算量,实际使用的是多头的self- attention,相比于单头的self-attention,计算量多了一个最后融合矩阵的计算,其计算量也是h * w *c *c,所以全部加起来为上面那个公式
对于W-MSA的公式
W-MSA是将特征图划分为一个个window,window的大小为M * M,个数为h/M * h/M,带入MSA的公式就可以得到W-MSA的计算量
SW-MSA
W-MSA虽然可以减少计算量,但缺点也是显而易见的,window与window之间没有联系,不能获取到全局的信息,为此引入了SW-MSA模块,进行偏移的W-MSA,如下图
相当于将分界线向下,向右偏移[m/2]个像素,再重新融合得到右图,这样的好处在于将左图的不同window进行了融合,达到了不同window之间通信的效果,但这样做的坏处在于window从4个变为了9个,不利用并行计算,所以作者提出了cyclic shift方法,如下图所示
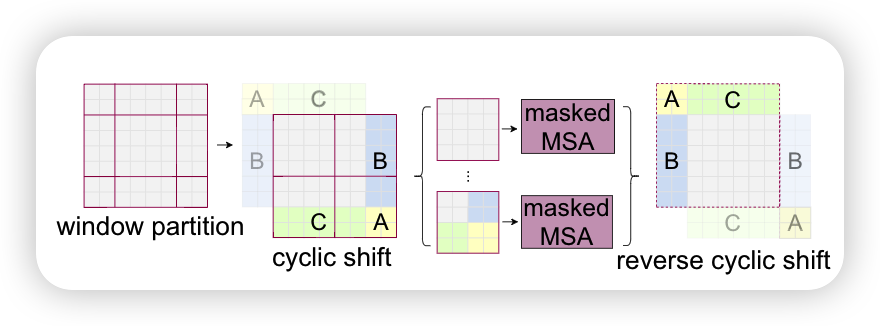
通过上图可以看出作者将边缘分块进行了位置上的调整,重新变为了4个window,但由于拼接的部分不是连续的,不适合放一起计算,所以虽然放在一个window中,但还是各自计算各自的,通过mask机制来实现,即在计算其中的一部分时,将另一部分减一个大的数,经过softmax之后这部分就会变为0,达到了mask的效果
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
def create_mask(self, x, H, W):
# calculate attention mask for SW-MSA
# 保证Hp和Wp是window_size的整数倍
Hp = int(np.ceil(H / self.window_size)) * self.window_size
Wp = int(np.ceil(W / self.window_size)) * self.window_size
# 拥有和feature map一样的通道排列顺序,方便后续window_partition
img_mask = torch.zeros((1, Hp, Wp, 1), device=x.device) # [1, Hp, Wp, 1]
# 将图像进行切片,按照shift来进行分割
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
# 给不同的slices区域编号
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
# 将feature map按照window_size划分成一个个没有重叠的window 维度为[nW, Mh, Mw, 1]
mask_windows = window_partition(img_mask, self.window_size) # [nW, Mh, Mw, 1]
# 将每一个window展平
mask_windows = mask_windows.view(-1, self.window_size * self.window_size) # [nW, Mh*Mw]
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) # [nW, 1, Mh*Mw] - [nW, Mh*Mw, 1]
# [nW, Mh*Mw, Mh*Mw] 通过相减,同区域的为0,赋值为0,不同区域的赋值-100
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
return attn_mask
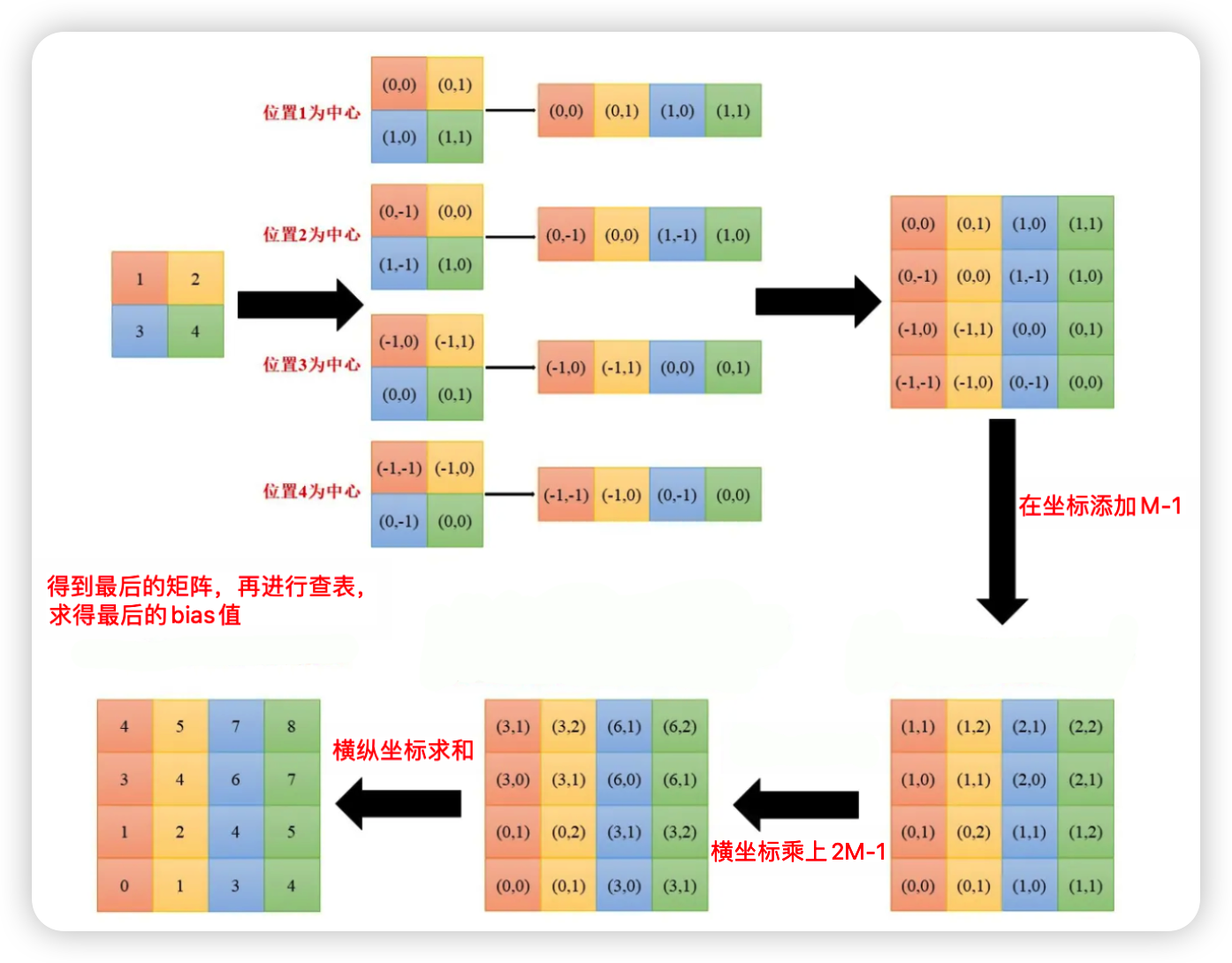
Relative position bias

Bias计算过程
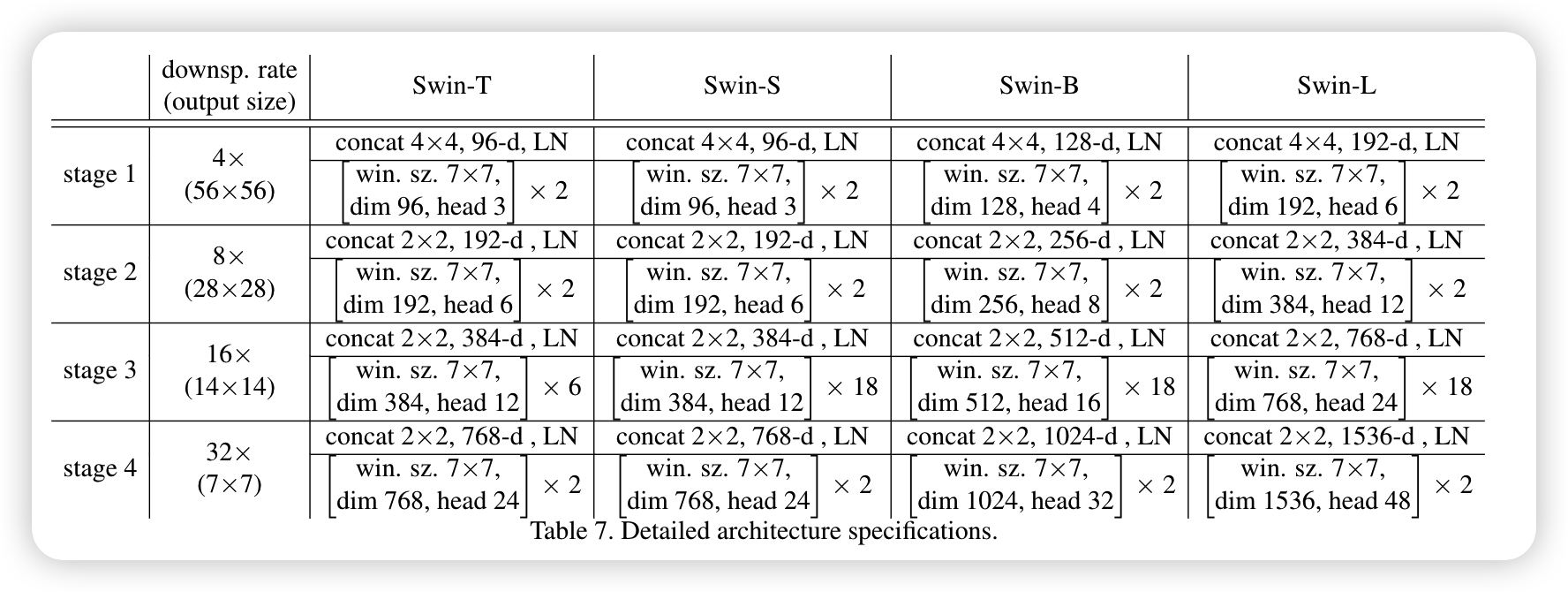
下表是论文中关于不同Swin Transformer的配置
-
Previous
vision-transformer -
Next
Rich CNN Features for Water-Body Segmentation from VeryHigh Resolution Aerial and Satellite Imagery